


ベルンシュタイン問題
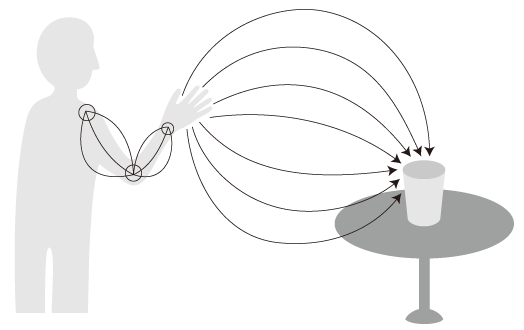
ここで、ドイツの数学者フェリックス・ベルンシュタイン(1878~1956)の定理について触れておこうと思う。目の前のテーブルに置いてあるコップを取ろうとして手を伸ばすとき、手先がとりうる軌道は無数にあり(図4)、さらにその軌道を実現する関節角度の組み合わせも無数にあり、その関節角度を実現する筋の組み合わせも無数にある。神経系はこの冗長多自由度の中から、適切に軌道、関節角度、筋の組み合わせを選び、運動を実現している(7)。このように無数にある軌道のうち、どのようにして一つの軌道を決めているのかという問いは「ベルンシュタイン問題」といって、その真の理由はいまだに分かっていないが、このことに対する一つの考え方として、「筋シナジー」仮説がある。
「筋シナジー」は、さきほどもふれたが、一次運動野の神経細胞が、「筋シナジー」といわれる、ある筋収縮パターンの組み合わせを起動しているのではないかということに関係している。これはつまり多くの自由度を有する身体運動を制御するために、中枢神経は、個々の筋に筋単位で別々に指令を送るのではなく、複数の筋肉から構成される筋群に対して指令を送っているのではないかという仮説で、身体運動は筋単位で制御されているのではなく、複数の筋シナジーを組み合わせて実現されているということである(8)。つまり起動させる「筋シナジー」を適切に決定し、組み合わせることなどによって、必要な運動軌道を実行しているのである。
ただここで、たとえば(リーチング行為なども含め)、以前に行ったことのある動作、行為と同じ動作、行為を実行する場合でも(あたりまえかもしれないが)、前回とまったく同じように動くことは、経験的にも難しいように思う。まったく同じように動くという意味は、厳密には動員される一つ一つの筋線維の局在と数、そしてそれぞれの筋線維に対する神経の発火活動とを、毎回100パーセントまったく同じ状態で活動させるということである(筋線維の動員と神経の発火頻度自体を意識的にコントロールすることはできないといわれる)。このことは、たとえばフィギュアスケートや体操の定式運動など、熟練したアスリートであっても、環境などの影響もあるかもしれないが、行うべき動きを失敗したりすることがあるのを見ても理解できる。
ある物体に手を伸ばすリーチング行為で、無数にある手の軌道のうち、どのようにして一つの軌道を選択しているのかという問いに関して、人はだいたい同じような軌道を描く傾向があるといわれる。これによると、対象物までの手の動きはほぼ直線的となり、動き始めはゆっくりとした動きで、途中は速い動きとなり、対象に手が到達する終わりの部分はまたゆっくりとした動きとなるという速度変化(横軸に時間、縦軸に速さのグラフで左右対称の山型)となるという。この動きの軌道が、最も動きやすいということでよく選択されるということなのか、だとしても動きやすいというのはどのようなことを意味するのかは難しい。はじめは速い弾道運動(フィードフォワードによる動きといわれる)で、対象に近づくとゆっくりとした修正運動(フィードバックによる動きを加味する)ということなのかもしれない。
またこのような動きが、どのような計算理論で実行されるのかということが議論されている。リーチング行為であれば、手の長さ、関節の角度、対象物の方向、距離などを使った難解な計算式がある。動きに参加する関節の数が一つ増えると動きの自由度が増し、さらなる難しい計算が必要となる。もちろんこの場合の対象は静止している物体を考えていて、もし動いている対象物をつかむような場合は、さらに難解な計算式となるだろう。
内部モデル
脳が複雑な計算を一瞬のうちに解いて行動を起こしていると考えるよりも、動きのもととなる何らかの動きの記憶(これを内部モデルという)をすでに持っていて、この「内部モデル」を使って新たな動きがつくられていくという考え方が主流となっている。これによって、すみやかに動作、行為をつくりだすことができる。
「内部モデル」という言葉の意味は、一つだけではなく、いくつかの意味でつかわれることがあるので注意が必要である。これには大きく二つの意味が考えられる。
一つは、学習によって外部世界の仕組みを取り込んで、外部世界を脳の内部に表象し(内部表象)、脳内で模倣、脳内シミュレーションをしたり、予測を行う機構という意味での、外部世界に対する脳の「内部」という意味での「内部モデル」という使い方である。もう一つは、さまざまなそして瞬時に行われる複雑な動きを、どのように脳は制御し実行しているのかという問いに対し、計算論的な立場ではなく、脳が「内部モデル」という、動作、行為のもととなる何らかの「原型」のようなものを、学習と記憶によって形成していて、それを使って、瞬時の複雑な動作、行為を実行しているのではないかという、運動行動そのものの成立に関した原型という意味合いでの「内部モデル」である。「内部モデル」には「順モデル」と「逆モデル」があるという表現をする場合は、運動を制御するという意味での「内部モデル」ということと考えられる。
内部モデルには、順モデルと逆モデルとがある。これは、「動作や行為」とその「結果」との関係性から考える、概念的なものともいえる。順モデルとは、こうすればこうなるという、「動き」からその「結果」を考えるものである。逆モデルとは、ある「結果」を得るには、「このように動けばいい」という、結果から動きを逆算して考えるものである。文脈的には、ある状況において、このように動くとこういう結果が得られるというのが順モデルで、ある結果を引き出すためには、このように動けばいいというように、予測される結果から、そのために必要な動きを導き出すという考え方が逆モデルである。
内部モデルはどのようにしてつくられるのか。内部モデルのうち、「順モデル」は、はじめ幼少の頃からの動きに対する経験と、経験を通しての学習に伴う記憶の蓄積によってつくられると考えられる(9)。ちなみに幼少児は手足を動かしたり、ずっと体が動いている印象がある。成長の過程において、さまざまな動きが行われていくことは確かなのだろう。ただ両手をふらふらと上下左右に揺らすような動作のように、客観的にはあまり意味がないように思われる動きなども含め、たくさんの動きが営まれていく過程で、徐々に意味のある動きが構築されていくということになるのではないか。
ピアジェは乳児期に「随意運動の認知スキーマ(運動についての知識の基本概念)」が形成されるとしている(1)。この運動スキーマや認知スキーマは「経験によって記憶された随意運動の運動プログラム」にほかならない。乳幼児の動きが開始される最も初期の段階で、自分の体の動きに対する認識、さらに外部世界との関係における自分の動きの認識が形成されていくということである。まず基本的なところで、自分の手や足を、こうしたらこう動くんだという、自分自身の手足、体の動きそのものに対する理解、認識と、さらにそれらを動かそうとする自分自身の意図との関係性の理解である。この過程で「こうすればこう動く、こうすればこうなる」という理解、認識がなされていくことになり、これは「順モデル」の形成ということになる。
つまりまず自分の体の動き自体に対する「順モデル」が形成されていく(自分がこう動かそうとすれば、こう動く、つまり自分自身の体を動かそうとする意図と、それによって引き起こされる自分自身の体の動きがどのようなものかということの関係性が理解されていくわけである)。そしてたとえば近くにあるものに手を伸ばせばそれに届く、触れる、そしてそれを手でつかんで顔のそばに持ってくることができる、口の中に入れることができるというように、物に対して自分ができる動き、働き掛けをいろいろと行っているうちに、外界の事物にこうすればこうなる、こう働き掛ければこういう結果となるという、自己と外部世界との関係における「順モデル」が形成、蓄積されていく。自分ができる動きを学習していく、つまり自分の体の動きと、外部世界の物体、環境などに対する自分の動きによる働き掛けとの関係性が、まったくわからない状態から、さまざまな経験によって、自分ができる自身の動きに関しての内容(順モデル)を、自分なりに理解、学習していくのである。そして次には、「こうなるためにはどうしたらいいのか、こうするためにはこう動けばいいのだ」という考え、つまり「逆モデル」としての考え方が認識され、これもさまざまな動きの経験を通して学習、蓄積される。このようにして自分の中に構築されていく動きの記憶が、「内部モデル」としての、初期の段階からの発達の過程で形成される。
具体的には、たとえば積み木を積み上げる際、バランスを取りながら積むと高く積める(順モデル)ことがわかり、逆に高く積むにはバランスを取りながら積めばいいんだ(逆モデル)のような内容である。こう考えると、一般に動作、行為というのは、順モデル的な考えと、逆モデル的な考えとを組み合わせてつくりだされているともいえる。たとえば駅で知り合いの人とすれ違って、「あ!」と思って振り返り、その人に追いつくためには走って行けば間に合う(逆モデル)、と思ったとしても、もしここで走って行ったら、これだけ混雑している中で皆から「何だ!」と迷惑がられる(順モデル)ように思ったので、追いかけるのをやめた、というような状況である。つまり結果をだすためには逆モデル的な発想で行為を選択するが、実際その行為をやった場合に考えられる状況(知り合いに追いつくという期待される結果以外の状況、これは順モデル的に予測される)を考慮し、その行為を実行するかどうかを判断する、ということになる。
ちなみにここで意味があるように思われる何らかの動き、たとえばリーチング動作を考えてみると、その動きを最初に行った瞬間、つまりその動きが初めて行われた状況というのが必ず存在するはずと思われるが、この際、何らかの動きが何回も繰り返されていくうちに、徐々にその動きに近づいていって、最終的にその動きに到達するということなのか、あるいはある時突然に(偶然に?)その動きが行われるということなのか、これに関しては個人差もあると思われ、いろいろな状況が考えられる。
行為の模倣
動きを学習していく際、ある種の動きが成立していく過程で大切なこととは、模倣つまり他者の行為のまねをするということなのだと思われる。模倣というのは周囲の人の動きを見て、同じように行動するということである。動物は種によってそれぞれ特異的な動きがあると考えられているが、これはつまり、ある種に属する個体は、周囲の個体と同じような動きをするようになるということで、これはその動物種の動きが、ある部分で周囲の個体の動きを模倣することによってつくられていることの一つの根拠となっているであろう。ある目的を達成するために必要な動作を、自分だけでまったくゼロからつくりあげることには、たいへんな労力が必要な場合もあるが、すでにその動作、行為を行っている他者の動きのまねをすることによって、簡単に必要な動作、行為を習得できると考えられるわけである。
参考文献
- 1)『人間の運動学 ―ヒューマン・キネシオロジー』
宮本省三 (著)、 八坂一彦 (著)、 平谷尚大 (著)、 田渕充勇 (著)、 園田義顕 (著)
協同医書出版社 2016年 - 7)「筋シナジーに基づく複合動作のパターン識別」
辻 敏夫、島 圭介、村上洋介
日本ロボット学会誌/2010年28巻5号(p.606-613) - 8)「筋シナジーによる運動構築の神経基盤」
大屋知徹
日本ロボット学会誌/2017年35巻7号(p.506-511) - 9)『人間発達学(Crosslink basic リハビリテーションテキスト)』
浅野大喜(編集)
メジカルビュー社 2021年
| 動きと意識 【全7回】 | 公開日 |
|---|---|
| (その1)Ⅰ 動きと意識のダイナミクス | 2025年6月30日 |
| (その2)Ⅰ 動きと意識のダイナミクス | 2025年7月30日 |
| (その3)Ⅰ 動きと意識のダイナミクス | 2025年8月29日 |
| (その4)Ⅰ 動きと意識のダイナミクス | 2025年9月30日 |
| (その5)Ⅱ 脳と運動の相互作用 | 2025年10月31日 |
| (その6)Ⅱ 脳と運動の相互作用 | 2025年11月30日 |
| (その7)Ⅱ 脳と運動の相互作用 | 2025年12月26日 |